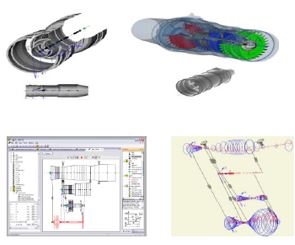
로터다이나믹 설계 및 해석 R4
Introduced by 추천 전문사 AST
AST는 이에 대한 최적의 로터시스템 해석 및 전문 설계소프트웨어를 추천합니다.
DynamicsR4는 2016현재 국내 K연구소, D중공업, H사 등에서 사용하고 있으며 많은 연구소 및 기업체에서 DynamicsR4의 사용 및 활성화가 진행될 예정입니다. 자세한 내용을 추가로 적어드립니다.
1. DynamicsR4 현재 버젼
1) User Guide (www.alfatran.com/dyn/userguide_eng.pdf )
2) Tutorial (www.alfatran.com/dyn/Tutorial_English.pdf )
3) Simulation in Dynamics R4 (HowTo…) (www.alfatran.com/dyn/dynamics_r4_howto_eng.pdf )
Useful materials on Dynamics R4 applications:
4) Solutions (http://www.alfatran.com/solutions.shtml )
5) Publications (http://www.alfatran.com/publications.shtml )
6) Media Library (http://www.alfatran.com/movie.shtml )
2. DynamicsR4: FEM tool
1) DynamicsR4.9는 1D와 2D를 지원하는 FEM tool 입니다.
따라서, beam, shells, springs, masses, nonlinear element 등과 같은 special elements들을 가진 FEM tool 입니다.
2) rod-shaped structure 지원하고, Flat cross-section hypothesis를 가집니다.
3) Global dynamics matrix, FEM solver를 가지고 있습니다.
4) Modal methods of SOE reduction
5) 현재 DynamicsR4는 Solid elements(3D) 구조물을 모델링하는 기능은 가지고 있지 않습니다.
6) Recommendations for cases modeling using FEM
7) Recommendations to model section of rotor shaft using FEM
3. DynamicsR4의 특징
1) Rotor 해석시, rotor case의 영향도 무시할 수 없는데, DynamicsR4에서는 rotor+case에 대한 해석이 커플링이 되어 함께 이루어 집니다. 샤프트 사이의 연결은 다양한 링크로 만들어 질 수 있습니다.
2) 각 자유도를 조정하는 것이 가능한데, rotor와 case 사이의 링크 뿐만 아니라, 로터 요소의 링크도 조정하는 것이 가능합니다.
3) 사용자 메뉴얼(User Guide)을 보면, [2, p.9-51 : 9-59]에 강성, 댐핑 특성, 그리고 구속조건의 정의에 대한 예를 확인하실 수 있습니다.
4) Generalized element와 coupling에 대한 flexibility에 대한 내용은 UG(UserGuide)의 [2,p.8-42:8-48]에서 확인하실수 있습니다.
5) 베어링 종류의 경우, Any kind of journal bearing in quasi linear statement (If you have non-symmetric stiffness and damping coefficients). Plain journal bearing in non-linear statement. Full list of available nonlinear bearings can be found in UG [2,p.
11-71 : 11-94]. Nearly each new version of Dynamics R4 comes out with new nonlinear element. The next one will include [Floating ring seal] and [Crack] elements.
6) 베어링의 강성과 댐핑계수 경우, Via additional output in nonlinear bearings. See 48 example in Tutorial [3], or [Rolling Bearing Info] post-processing for 5DOF angular – contact ball bearing UG[2, p. 16-179].
7) 댐퍼의 종류의 경우, You may found the equations used for SFD in the Appendix 3 of Tutorial [3, p. 123] ; list of parameters in UG [2, p. 11-82]
8) DynamicsR4 내부에서 댐퍼 모듈을 생성시키고 사용하는 A short presentation on plain journal bearings which used the same equations as SFD may be interesting for you
www.alfatran.com/pptx/plain_journal_bearing.ppsx
9) 기어종류의 경우, Dynamics R4 allows to simulate rotor systems with free orientation of spin axes. Analysis in our software is performed for coupled lateral, axial and torsional vibrations. (No separate analysis for lateral and torsional vibrations)
Our GearSet link allows to model cylindrical gears couplings with spur and helical teethes (inner or outer); bevel gears with consideration of moment in contact. Please see updated User Guide [2] and Tutorial Guide [3]. Especially take a look at our How To [5] - “12 Simulation of bevel gear set”
TEL: 02-6480-9991 sales@astint.co.kr, Copyright. 에이에스티(AST) www.astint.co.kr
진동교육, 진동계측, 진동컨설팅, 진동진단, 설비진단, Pdm, 예측진단, 진동센서, 소음센서, 진동시뮬레이터, 진동해석소프트웨어
 고객센터 > 기술 자료실
고객센터 > 기술 자료실
























